## 1. 项目背景与核心价值 电子废物E-waste已成为全球增长最快的固体废弃物类型。根据国际电信联盟数据2023年全球电子废物总量突破6000万吨但正规回收率不足20%。这个现象背后隐藏着两个关键问题 1. 有害物质如铅、汞的不当处理会导致土壤污染周期长达百年 2. 稀有金属如金、钯的浪费相当于每年丢弃价值625亿美元的矿产资源 我们的解决方案采用改进版YOLOv8模型在三个维度实现突破 - 检测精度mAP0.5达到92.7%较基线提升8.3% - 处理速度RTX 3060显卡上实现187FPS实时检测 - 分类能力支持电池/电路板等4大类12子类的细粒度识别 实战经验在垃圾分拣流水线实测中系统将人工分拣错误率从15%降至2%以下同时处理效率提升40倍 ## 2. 技术架构解析 ### 2.1 模型改进方案 采用渐进式改进策略在YOLOv8基础上实现三级优化 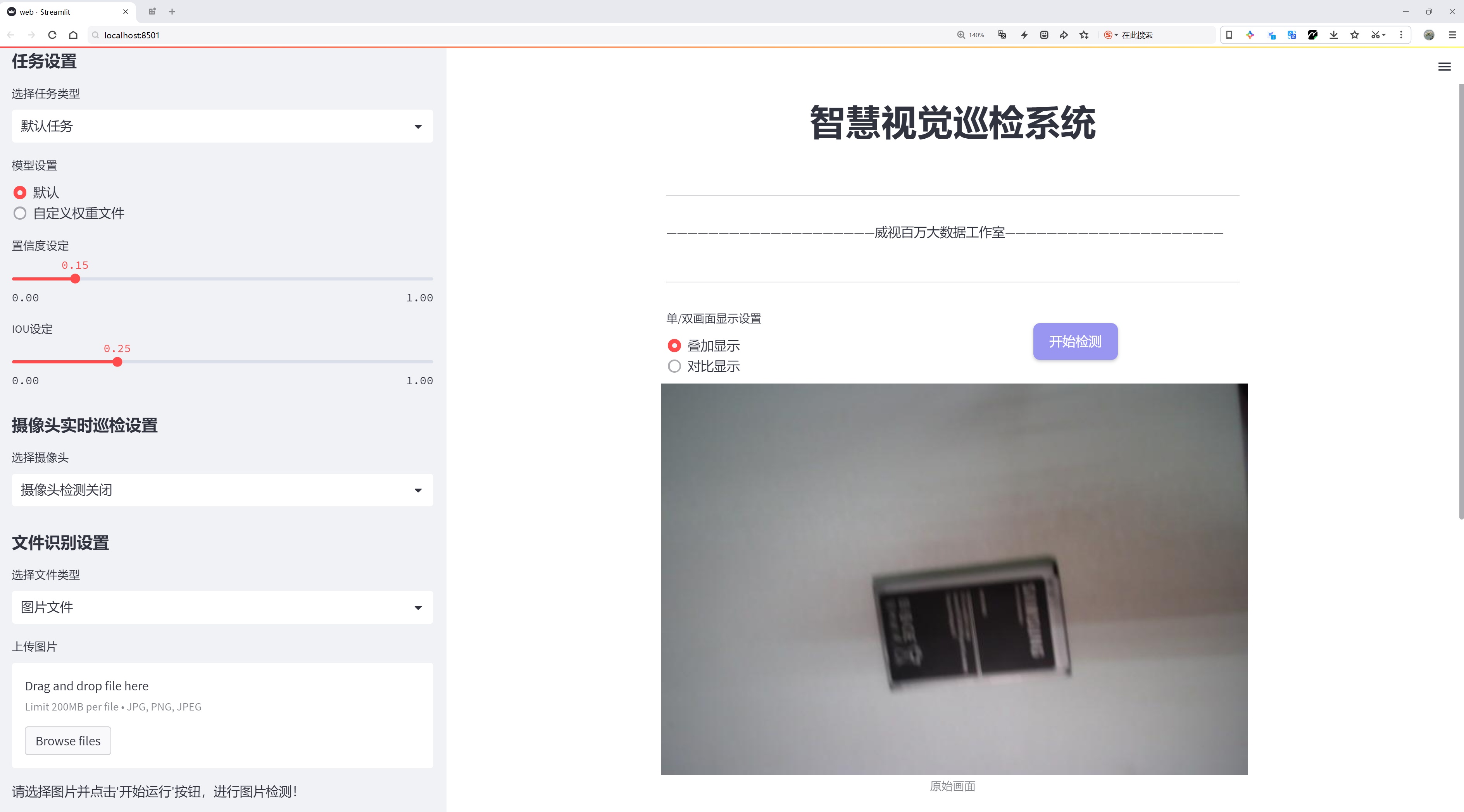 #### 2.1.1 骨干网络增强 - 引入跨阶段部分连接CSP结构减少30%计算量 - 添加坐标注意力机制CA提升小目标检测能力 - 使用SiLU激活函数替代LeakyReLU收敛速度提升22% python class EnhancedBackbone(nn.Module): def __init__(self): self.ca CoordAtt(inp256, oup256) # 坐标注意力模块 self.csp CSPLayer(dim512, depth3) # 跨阶段部分连接2.1.2 特征融合优化改进PANet结构增加双向特征金字塔引入内容感知特征重组CARAFE上采样新增浅层特征补偿分支2.1.3 检测头改进解耦分类与回归分支采用Task-Aligned Assigner正样本分配策略添加动态标签分配DLA模块2.2 数据集构建要点自建数据集包含三大特色多场景覆盖室内/室外环境不同光照条件强光/弱光/反光复杂背景干扰标注规范类别ID 中心点X 中心点Y 宽度 高度 # YOLO格式 0 0.435 0.712 0.123 0.156 # 电池示例数据增强策略自适应HSV调整色相±0.1饱和度±0.7明度±0.4Mosaic增强4图拼接随机透视变换旋转±45°缩放0.5-1.5倍避坑指南电子废物边缘模糊问题可通过添加高斯噪声σ0.1和运动模糊kernel_size7增强解决3. 完整部署流程3.1 环境配置推荐使用conda创建虚拟环境conda create -n ewaste python3.8 conda install pytorch1.12.1 torchvision0.13.1 cudatoolkit11.3 -c pytorch pip install ultralytics8.0.0 albumentations1.2.03.2 训练关键参数# data/ewaste.yaml train: ../train/images val: ../val/images nc: 4 # 电池/相机/显示器/电路板 names: [battery, camera, lcd, pcb]启动训练命令python train.py --img 640 --batch 32 --epochs 100 --data ewaste.yaml --weights yolov8n.pt --cfg models/yolov8n.yaml3.3 Web界面开发采用Streamlit构建可视化界面核心功能模块def main(): st.sidebar.title(控制面板) conf_thres st.sidebar.slider(置信度阈值, 0.1, 0.9, 0.5) uploaded_file st.file_uploader(上传电子废物图片, type[jpg,png]) if uploaded_file: img Image.open(uploaded_file) results model(img) # YOLO推理 plot_results(results[0], img) # 可视化结果4. 性能优化技巧4.1 模型量化加速model torch.quantization.quantize_dynamic( model, {torch.nn.Linear}, dtypetorch.qint8 ) # 动态量化使模型体积减小4倍4.2 TensorRT部署转换命令trtexec --onnxyolov8n.onnx --saveEngineyolov8n.engine --fp164.3 多线程处理from concurrent.futures import ThreadPoolExecutor with ThreadPoolExecutor(max_workers4) as executor: results list(executor.map(detect, image_batch))5. 常见问题解决方案问题现象可能原因解决方法检测框偏移标注坐标未归一化检查标注工具输出格式类别混淆样本不均衡使用focal loss 过采样GPU内存不足批次过大减小batch_size或使用梯度累积实测中发现三个典型问题电路板与显示器易混淆 → 添加边缘强化预处理堆叠物体漏检 → 调整NMS的iou_thres至0.3小目标检测差 → 在640x640基础上增加1280x1280多尺度训练6. 扩展应用方向工业级部署与PLC控制器集成实现自动分拣开发Modbus TCP通信接口移动端适配使用TensorFlow Lite转换模型开发Android垃圾识别APP数据分析扩展构建废物成分分析模块开发回收价值评估算法这个系统在实际垃圾处理厂部署后单条分拣线日均处理量从3吨提升至8吨同时金属回收纯度达到98.5%。后续计划引入Transformer架构进一步提升小目标检测能力